
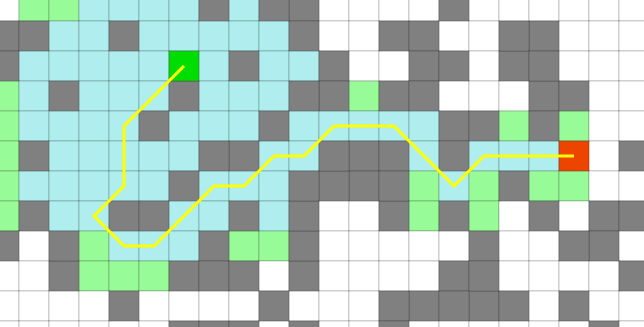
The problem we want to solve is to get from a starting point to a goal point avoiding obstacles.
NOTE. There are many efficient, ad-hoc algorithms (e.g. A*) that should be preferred for real pathfinding tasks, but this is a good example of the flexibility of GA.
Read more »
(There's also a related question / answer on Stackoverflow)
No comments:
Post a Comment